烟台新天地试验技术有限公司
电话:0535-3940588
传真:0535-3940588
手机:13356920078(技术咨询服务)
15315459131(产品信息服务)

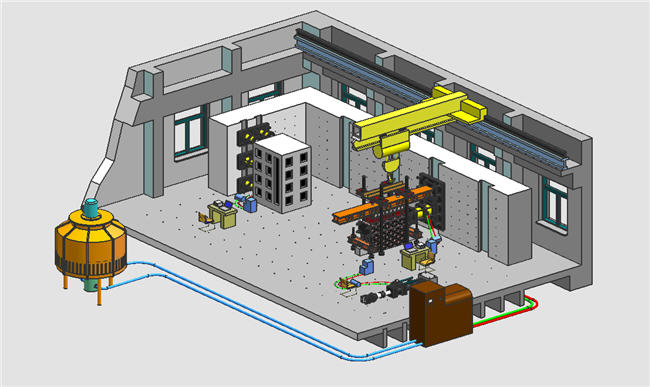
多通道电液伺服加载试验系统 电液伺服加载试验系统是指以伺服作动器为加荷单元,通过控制单元控制伺服作动器的加载,由于电液伺服加载试验系统是通过微小电信号控制以液压油为动力源伺服作动器动作的,故习惯上称之为电液伺服加载系统。 典型的电液伺服加载试验系统由以下几部分组成:1.作动器单元、2.伺服控制单元、3.泵站单元、4.加载架单元、5.辅助设备单元、6.试验对象等组成。 电液伺服加载试验系统的特点是可施加的荷载大,但动作频率低,主要应用于静力及拟静力结构试验,主要应用领域为:建筑结构静力及拟动力试验、飞机等航天器结构静力及拟动力试验、车辆等运输工具振动试验、波浪模拟试验、零部件疲劳试验等。 典型的多通道电液伺服加载试验系统组成框图。
系统组成
电液伺服控制系统由伺服控制单元(PID调节单元)、动作执行单元(伺服作动器单元)、供油单元(泵站单元)、试验对象、测试单元组成。
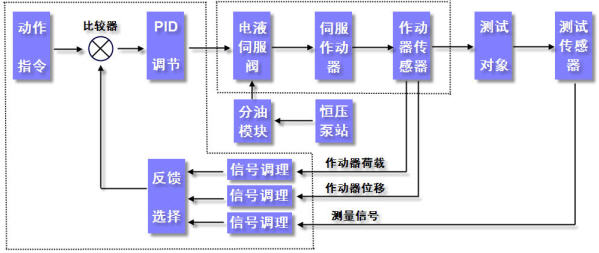
控制原理
电液伺服控制系统采用PID伺服控制技术,即通过对动作指令信号与动作反馈信号的差值同时进行比例、积分、微分调节运算,得到伺服作动器下一动作指令,以此指令控制电液伺服阀的流量,从而达到控制伺服作动器荷载的或位移的变化速度以减小动作指令信号与动作反馈信号的差值,并据此差值,给出新的动作指令,如此循环,达到伺服作动器的输出稳定跟踪动作指令的控制结果。
控制对象切换
试验过程中,有时需要根据试验结果调整试验控制对象,伺服控制系统可根据需要进行不同指令信号及反馈号的平稳切换。
控制参数调整
由于PID伺服控制技术是通过指令信号与动作反馈信号的差值确定下一动作指令的,因此,其动作与指令之间永远存在差值,包括幅值差与相位差,控制系统控通过调整不同的比例、积分、微分系数,得到不同跟踪性质的伺服控制系统。
系统分类
根据荷载的变化频率,电液伺服加载系统可分为静载系统、拟动力系统、疲劳振动系统;根据所用作动器的数量不同,电液伺服加载系统可分为单通道、双通道、多通道伺服加载系统。
系统简介
多通道电液伺服加载系统可完成试验对象的多点协调同步加载,在伺服控制上与单通道系统的最大区别在于如何保持各通道动作的协调同步。由于控制伺服器动作控制的核心器件电液伺服阀的幅频、相频特性并不能严格一致,动作执行单元伺服作动器的传递函数更有可能有较大差异,这样,对于同步的动作指令,就会有不同步的动作,因此,根据系统的各通道的动作情况,在伺服控制中,增加同步控制调节,是多通道电液伺服加载系统所必需的。常用的同步方法有:幅值修正法、相位修正法、踏步等待法。
幅值修正法
幅值修正法是指在周期性重复加载过程中,通过检测反馈幅值与给定命令的误差,对加载命令的幅值进行修正,而改变反馈值,最终使反馈幅值与给定加载幅值的误差在给定的误差限内。
相位修正法
相位修正是指在周期性重复加载过程中,通过检测各通道反馈间的相位与命令相位的误差,对加载命令进行相位修正(即改变当前加载命令的相位),最终使反馈值之间的相位的差值在给定的误差限内。
踏步等待法
踏步等待法主要用于缓变加载过程中,将动作指令设置成若干同步等待点,通道动作达到同步点后即进行踏步等待,待所有通道反馈值与命令的误差进入设定的误差带后,再进行下一同步点的加载,如此梯次进行。
多通道电液伺服加载系统的同步往往需将多种同步方法协调使用,如周期动载多采用幅值修正与相位修正相结合的方法,缓变信号则采用踏步等待与幅值修正相结合的方法。